С бурным развитием электронной промышленности определение положения некоторых структурных компонентов постепенно меняется от первоначального контактного измерения к бесконтактному измерению черезДатчик Холла и магнит. Как мы можем выбрать подходящий магнит в соответствии с нашей продукцией и структурой? Здесь мы проведем простой анализ.
Для начала нам нужно определиться с материалом магнита. В настоящее время в датчиках положения Холла широко используются самарий-кобальтовый магнит и неодим-железо-бор. Основное различие между двумя магнитами заключается в том, что при одинаковом объеме магнит NdFeB сильнее, чем самарий-кобальтовые магниты; термическое отклонение самария-кобальта меньше, чем у Nd-Fe-B; стойкость к окислению самария-кобальта выше, чем у Nd-Fe-B, но обычно на внешней стороне магнита имеется покрытие, которое может решить проблему окисления; Самарий-кобальтовый магнит имеет лучшую термостойкость, чем магнит NdFeB, но значение термостойкости для обоих магнитных материалов может достигать более 200 ℃. Поэтому при выборе типа магнита мы должны оценивать его в сочетании с экономическими показателями, рабочей температурой и рабочей средой. В целом NdFeB можно использовать чаще, главным образом потому, что он имеет лучшие характеристики магнитного поля. Однако при работе в широком диапазоне температур рекомендуется выбирать самариево-кобальтовый магнит из-за его небольшого теплового дрейфа.
Кроме того, нам необходимо определить некоторые основные параметры магнита. В соответствии с информацией о положении испытания и направлении движения объекта мы определяем, является ли направление намагничивания магнита диаметральным или осевым. Кроме того, определяется, следует ли выбиратьквадратный магнитилицилиндрический магнитв соответствии со структурой установки. Конечно, иногда нам нужно настроить форму магнита в соответствии со структурой. Есть еще один фактор, требующий внимания к магнитному потоку, который всегда волновал нас при выборе магнита. Фактически, нам необходимо проанализировать его в следующих двух аспектах:
1. Напряженность магнитного поля, индуцируемая самим датчиком положения Холла, и диапазон индуцированного магнитного поля в каждом направлении будут четко указаны в паспорте датчика.
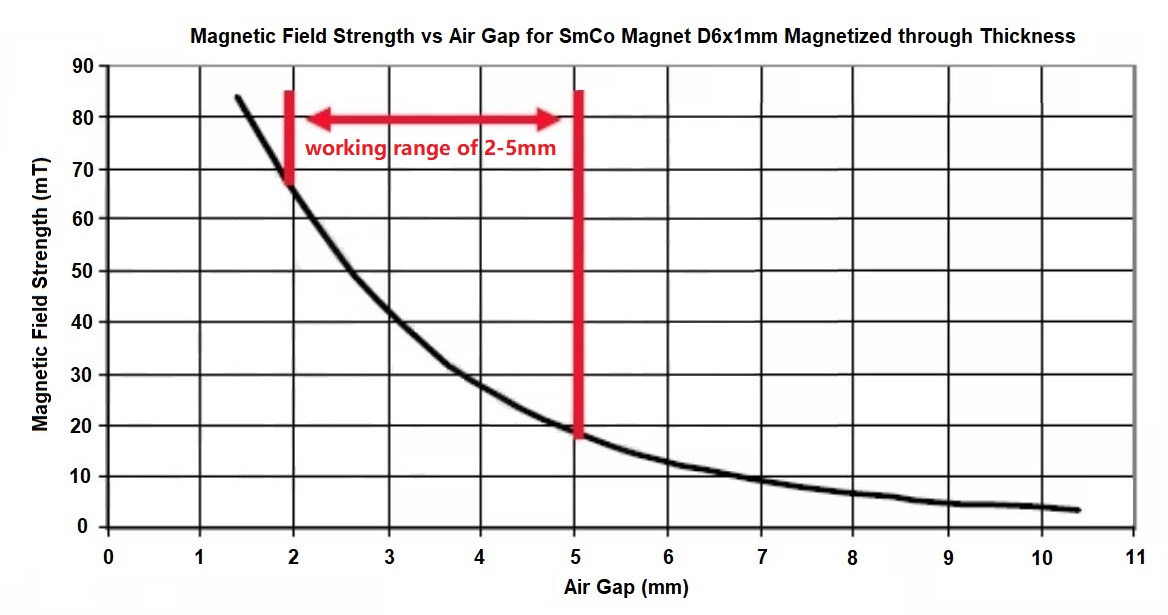
2. Расстояние между магнитом и самим датчиком обычно определяется конструкцией продукта. Согласно двум вышеуказанным аспектам и кривой изменения магнитного поля, показанной на рисунке ниже в качестве примера, мы можем определить напряженность магнитного поля требуемого магнита.
Наконец, мы должны понимать, что это не означает, что пока магнитное поле соответствует требованиям диапазона датчика, магнит может находиться на таком же расстоянии от датчика. Хотя сам датчик имеет функцию калибровки, нужно понимать, что когда магнит находится слишком далеко от датчика, в распределении самого магнитного поля сложно обеспечить линейность или близкое к линейности. Это означает, что при изменении положения и нелинейном распределении самого магнитного поля измерение датчика усложнится, а калибровка станет очень сложной, так что произведение не будет иметь приводимости.
Вышеупомянутое представляет собой простой анализ выбора магнита в датчиках Холла. Мы надеемся, что это будет полезно для вас. Если у вас возникнут другие вопросы в процессе разработки, свяжитесь с нами,Нинбо Горизонт Магнетикс. Мы можем продолжить общение и предоставить вам техническую поддержку.
Время публикации: 12 августа 2021 г.