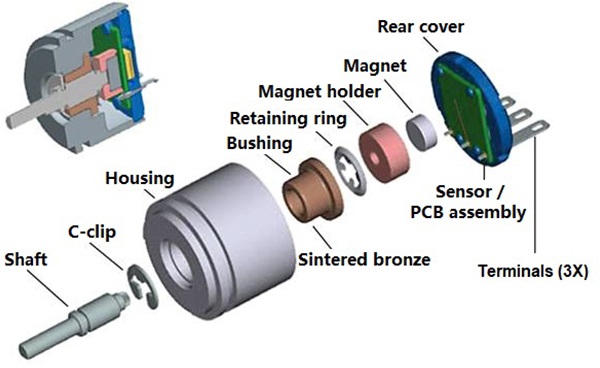
Если у вас есть возможность разобрать магнитный поворотный энкодер, вы обычно увидите внутреннюю структуру, подобную показанной выше. Магнитный энкодер состоит из механического вала, корпуса, узла печатной платы на конце энкодера и небольшогодиск магнитвращающийся с валом на конце механического вала.
Как магнитный энкодер измеряет обратную связь по положению вращения?
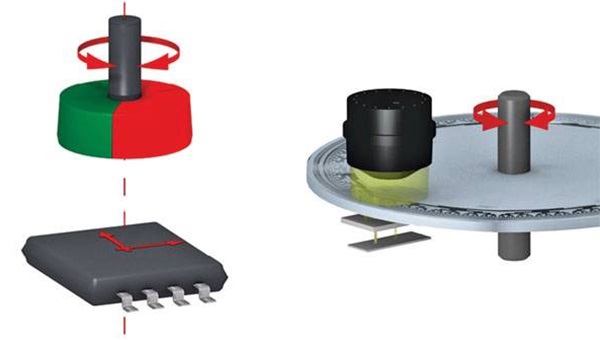
Эффект Холла: возникновение разности потенциалов в проводнике, по которому течет электрический ток, когда магнитное поле прикладывается в направлении, перпендикулярном направлению тока.
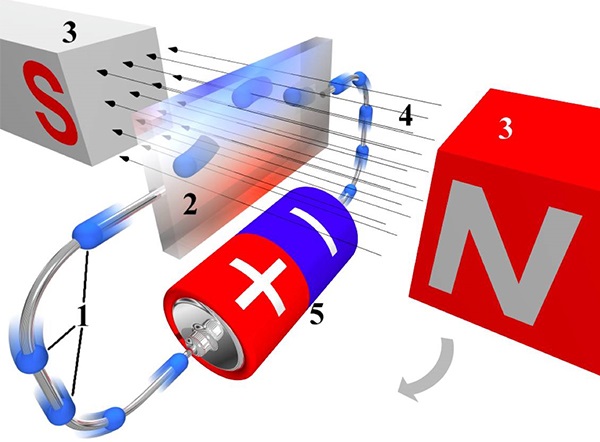
Если магнитное поле, приложенное к проводнику, вращается в направлении, указанном стрелкой выше, с направлением тока в качестве оси, разность потенциалов Холла изменится из-за изменения угла между магнитным полем и проводником, и Тенденция изменения разности потенциалов представляет собой синусоидальную кривую. Следовательно, исходя из напряжения на обеих сторонах проводника под напряжением, угол поворота магнитного поля можно рассчитать обратно. Это основной рабочий механизм магнитного энкодера при измерении обратной связи по положению вращения.
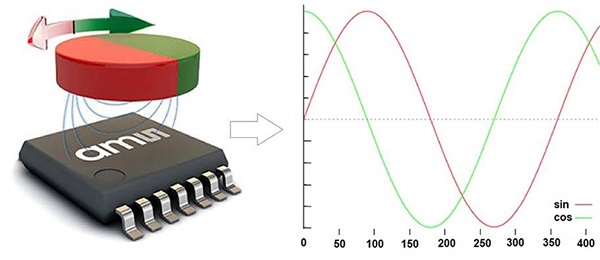
Аналогично принципу, согласно которому в резольвере используются два набора взаимно перпендикулярных выходных катушек, в магнитном энкодере также требуются два (или две пары) индукционных элементов Холла с взаимно перпендикулярными направлениями тока, чтобы обеспечить однозначное соответствие между вращающимся положением магнитного поля. и выходное напряжение (комбинация).
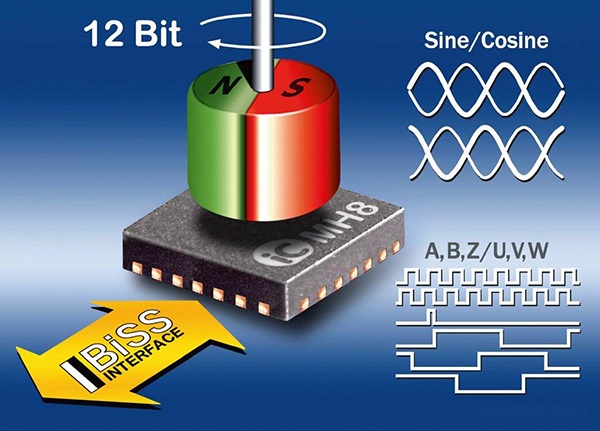
В настоящее время датчики Холла (чипы), используемые в магнитных энкодерах, обычно имеют высокую степень интеграции, которая не только объединяет полупроводниковые компоненты Холла и соответствующие схемы обработки и регулирования сигналов, но также объединяет различные типы модулей вывода сигналов, таких как синусоидальные и косинусоидальные аналоговые. сигналы, прямоугольные цифровые сигналы уровня или выходные блоки связи по шине.
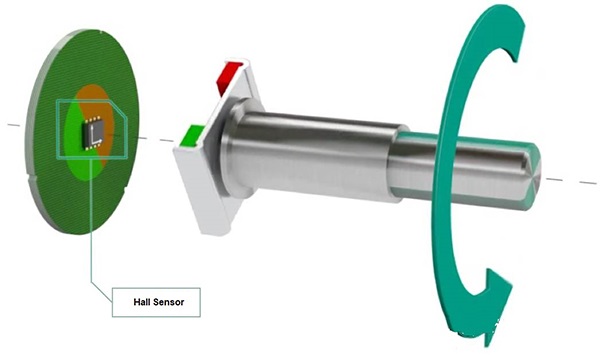
Таким образом, установите постоянный магнит, например спеченный неодимовый магнит, который генерирует магнитное поле, на конце вращающегося вала энкодера, поместите упомянутую выше микросхему датчика Холла на печатную плату и подойдите к постоянному магниту на конце энкодера. вал в соответствии с определенными требованиями (направление и расстояние).
Анализируя выходной сигнал напряжения от датчика Холла через печатную плату, можно определить вращающееся положение ротора энкодера.
Структура и принцип работы магнитного кодировщика определяют особые требования к этому постоянному магниту, например, материал магнита, форму магнита, направление намагничивания и т. д. Обычнодиаметрально намагниченный неодимовый магнитдиск – лучший вариант магнита. Компания Ningbo Horizon Magnetics имеет опыт поставок многим производителям магнитных кодировщиков некоторых размеров.диаметральные неодимовые дисковые магнитыДиски диаметром D6x2,5 мм и D10x2,5 мм. Неодимовые магниты из которых являются наиболее популярными моделями.
Видно, что по сравнению с традиционным оптическим кодером магнитному кодировщику не требуется сложный кодовый диск и источник света, количество компонентов меньше, а структура обнаружения проще. Кроме того, сам элемент Холла также имеет множество преимуществ, таких как прочная конструкция, небольшой размер, легкий вес, длительный срок службы, виброустойчивость, не боится пыли, масла, водяного пара и загрязнения соляным туманом или коррозии.
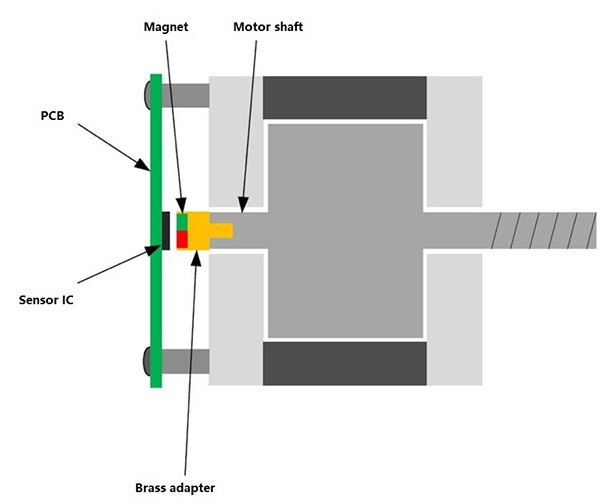
Когда технология магнитного энкодера применяется к обратной связи по положению вращения электродвигателя,спеченный магнитный цилиндр NdFeBМагнитный энкодер может быть установлен непосредственно на конце вала двигателя. Таким образом, можно отказаться от переходного соединительного подшипника (или муфты), необходимого при использовании традиционного энкодера с обратной связью, и добиться бесконтактного измерения положения, что снижает риск отказа энкодера (или даже повреждения) из-за вибрации механического вала во время работы. работа электродвигателя. Поэтому это способствует повышению стабильности работы электродвигателя.
Время публикации: 21 июля 2022 г.